
O PROJETO
Sobre o Projeto
Nosso objetivo principal é exercitar a maturidade de redes móveis abertas, desagregadas e inteligentes para responder a desafios de missão crítica em cenários de mobilidade urbana. Unimos Inteligência Artificial, redes 5G e simulação de última geração para criar um ecossistema focado na proteção ativa de vidas humanas nas vias públicas.
Infraestrutura Experimental
Sensores e Captura de Dados
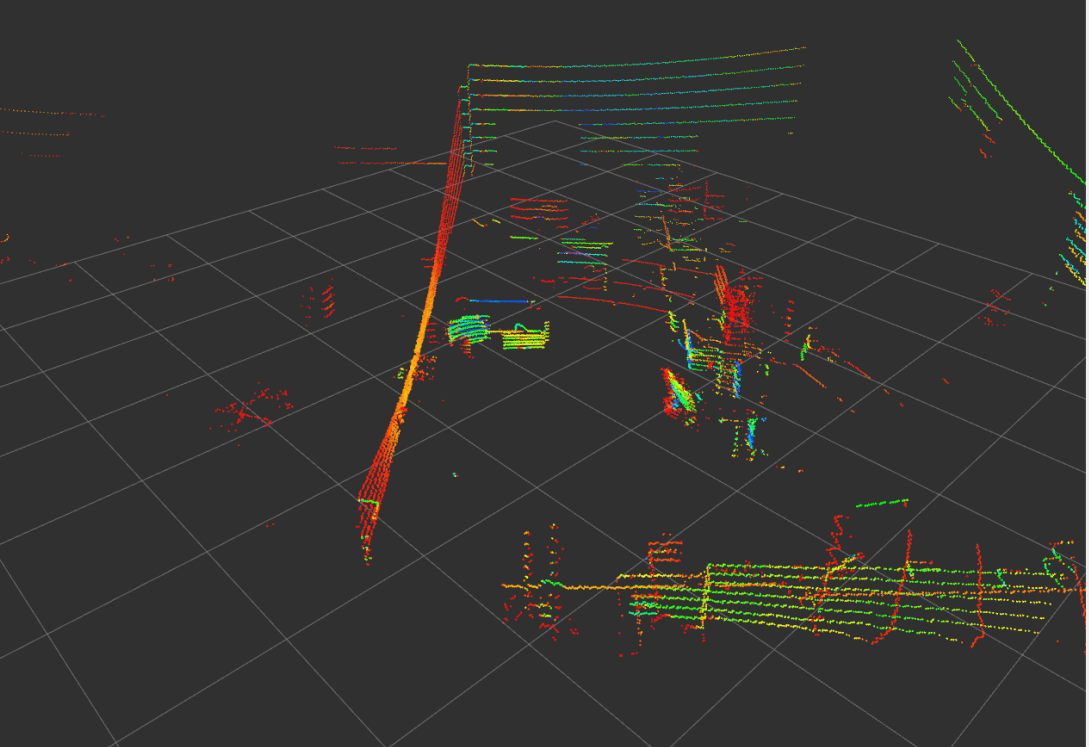
Sensores LiDAR 3D responsáveis pela geração de nuvens de pontos tridimensionais, trabalhando em conjunto com câmeras HD para o mapeamento espacial completo e detecção precisa de pedestres e ciclistas.
Unidades de Borda
Servidores de alto desempenho equipados com GPUs dedicadas, configurados localmente para processar os algoritmos de IA e Deep Learning na borda da rede, garantindo que os dados massivos dos sensores tenham resposta imediata.
Dispositivos OBUs
Unidades de Bordo (On-Board Units) instaladas diretamente no veículo físico de engenharia. São responsáveis por traduzir os dados dos sensores em mensagens padronizadas de segurança viária para transmissão rápida.
Unidades RSUs
Unidades de Acostamento (Roadside Units) instaladas na infraestrutura da pista. Atuam como pontes de comunicação de ultra-baixa latência (uRLLC) entre o ecossistema veicular, os utilizadores da via e a rede 5G Open RAN.
Arquitetura do Projeto
O ecossistema do Olha o Carro! opera através de uma arquitetura inteligente dividida em camadas de tempo, interligando a aplicação de tráfego aos controladores da rede móvel (RIC):

Predict rApp (Non-RT RIC): Atua na camada superior (com tempo de resposta >1s) dentro do SMO. É responsável por analisar dados contextuais e históricos de acesso para gerar políticas de otimização de longo prazo e predição de qualidade de serviço (QoS).
Conf xApp (Near-RT RIC): Atua na camada de tempo próximo ao real (<1s). Recebe as diretrizes da rApp via interface A1 e realiza o controle e a reserva dinâmica de blocos de recursos físicos (PRBs) e fatiamento de rede (Network Slicing) sob demanda da aplicação V2X.
Mon xApp (Near-RT RIC): Utiliza o modelo de serviço padrão E2SM-KPM para monitorar métricas cruciais de desempenho (vazão, latência e perda de pacotes) em curtíssimos intervalos de tempo. Se houver degradação na rede, ela dispara eventos automáticos para que a infraestrutura se reconfigure em menos de 10 milissegundos, priorizando o tráfego de segurança.
/
O Conceito Everything-in-the-Loop
O desenvolvimento de sistemas automotivos exige validações severas de acidentes, mas testar atropelamentos com veículos e pessoas reais nas ruas seria inviável e perigoso. Por isso, o projeto adota estritamente o conceito de Everything-in-the-Loop (XiL) acoplado a um Gêmeo Digital.
Na prática do projeto, nunca há testes simultâneos com pedestres e automóveis reais.
A validação ocorre unindo o mundo físico e o virtual através do simulador 3D CARLA.
Há duas dinâmicas complementares:
1. O veículo físico de engenharia realiza manobras reais na pista de testes e interage com um pedestre puramente virtual mapeado dentro do simulador.
2. Um pedestre real caminha em uma área segura monitorada e interage com um veículo puramente virtual no ecossistema digital.
Dessa forma, o framework calcula as trajetórias e valida as fatias de rede uRLLC e eMBB de forma 100% segura.
;
Linha do Tempo (Timeline)
Primeiro Ano: SMART Campus FACENS

Coleta e Calibração de Sensores
Mapeamento inicial do Smart Campus e sincronização temporal entre o veículo físico de engenharia, câmaras HD e o sensor LiDAR 3D.
Gêmeo Digital Integrado
Criação dos cenários virtuais de tráfego e geração de dados sintéticos massivos (nuvens de pontos 3D) através do simulador de código aberto CARLA.
Desenvolvimento Inteligente (RIC)
Codificação da lógica de software e arquitetura das aplicações de rede: a Predict rApp (Non-RT RIC) e as xApps de monitorização e configuração (Near-RT RIC).
Testes de Prorrogabilidade
Validação do framework híbrido Everything-in-the-Loop (XiL), garantindo que os algoritmos de IA detetam peões e ciclistas em ambiente simulado.
Segundo Ano: CPQD

Transferência Logística
Deslocação do veículo de testes instrumentado e de todos os equipamentos físicos (sensores, OBUs e RSUs) para os laboratórios do CPQD.
Acoplamento na Ilha Open RAN
Integração física e de software das xApps/rApps desenvolvidas diretamente no Orquestrador SMO e na infraestrutura de rádio desagregada do hospedeiro.
Validação de Ultra-Baixa Latência
Testes de stresse na rede 5G para garantir o isolamento do tráfego crítico através de fatiamento de rede (Network Slicing) dinâmico, mantendo a latência abaixo de 10ms.
Entrega dos Marcos Oficiais
Consolidação dos resultados da Prova de Conceito (PoC), publicação do White Paper técnico do projeto e abertura pública do código-fonte no GitHub.